新澳门六合彩历史开奖记录 奈何用空间领会几何法, 去进行天文定位定向的差错分析呢?
天文导航具有独到的优胜性是GPS等无线电导航系统无法相比的。它不错看成赋闲的一套导航系统。
三视场结构布局在 定位定向方面更为可靠 , 定位定向精度高。三视场系统由于有视场个数的冗余, 当其中某一视场受到杂光或者云层纷扰时, 其余视场仍然约略相同使命, 抗纷扰才气强;
而况当某一视场指向星点分散比较寥落的天区, 导致该视场内不雅测星点数目少而无法完成星图识时, 不错麇集其他视场中的星点, 通过三个子星图数据交融的规律完成星图识别进而擢升测量的成果。

三视场结构的优点除此除外还有:分视场的视场角不错更小, 以裁减天外配景杂音, 并擢升测量精度。 故三视场定位定向系统愈加健壮。
文中以三视场定位定向成立自己看成盘考载体, 接收三视场光学系统结构进行多传感器的测量来完成定位定向。
水平倾角传感器测量水平歪斜角 ρ、τ。 水平歪斜角传感器是商用的全温补高精度数字倾角测量成立, 它的空洞精度由无数实践测量细则。 它标称的单轴表率差为0.005° (±10°) 、0.003° (±7°) 、0.001° (±3°) 。由于测量次数未几, 其应稳健t分散。水平歪斜角的测量差错会影响到定位定向信息对中

的计较精度。
成立的时间由时间通讯系统提供。 在GPS有信号时, 通过GPS革新系统时间。 时间通讯系统的精度为10-11s , 而曝光时间锁存的极限差错为4.8 μs 。 由于莫得任何可参考的差错模子, 故以均匀分散对待。
因为67 ms的寰宇相助时差错会引起恒星在真春分点赤说念坐标系下约1″的差错, 故上述时间系统差错引起的恒星矢量Vγ的极限差错为7.2×10-5″ 。 它对恒星位置由Cγ到CTIRS的调遣影响也很轻细, 最终对定位定向信息对 中
潘伟力分析说道:“你说如果重新注册一个业余球队踢行不行?其实在很多城市是可行的。但是广州足球,确实应该是我见过的球迷最认单一球队的一个城市。”
张本美和的成长历程那可真是充满了传奇色彩。她爸妈都是乒坛厉害人物,她爸张本宇以前在中国四川省乒乓球队待过,后来还当了日本青年队教练;她妈张凌也是中国乒乓球国家队以前的队员,还当过马来西亚代表队教练呢。在这样的家庭环境下,张本美和两岁就开始学乒乓球了,老早就显露出惊人的天赋。小学毕业以后,她自己住进了学校宿舍,在木下集团的乒乓学院进行高强度的训练。

的计较影响在毫角秒的级别,引起的位置差错在1 dm以下。 是以在定位定向的仿真分析中忽略时间差错形成的影响。
温湿压传感器测量大气参数, 用于大气折射革新。 由成立制造商提供, 其标称的差错如下: 温度输出的标 准差为0. 2 ℃ ; 湿度输出的标 准差为2%RH;

大气压测量输出的表率差为0. 3 h Pa 。 大气测量参数稳健正态分散。大气参数测量的精度影响大气革新的精度, 对定位定向信息对中

形成影响。
在信噪比为10 d B时, 质心定位在x、y重量标的的表率差为0.051, 稳健正态分散 , 此由成立 标定测试时获取。质心提真金不怕火的精度影响了星角距的计较精度, 进而影响了星图识别。 另外质心提真金不怕火的精度影响到定位定向信息对中的计较精度。
光学系统 标定参数 包括三个 视场的焦 距fci、 主点、 畸变参数、 光轴在载体中的单 位矢量Axi Veci=[cos (Ai) cos (Ei) , sin (Ai) cos (Ei) , sin (Ei) ]T, 以及探伤器装配角。 这些参数由标定获取 , 光学系统参数的标定差错 通过公式2、3传递 , 影响到真值VB的计较。

标定参数的优化值{fci、KPi、Dti、Ai、 Ei、Fix Angi}′ 是通过多个星点组成的 {PtImg, VB} 通过优化分析得到的, 此时由PtImg通过公式2、3不错得到想到值VB′ 。光学系统标定参数的差错不错由想到值VB′ 与真值VB之间联系示意。
通过标定实践数据的合要素析发现:在空间中VB′ 绕着VB在其周围当场分散。 VB与VB′ 之间的角距稳健正态分散 , 均值为1.710″ , 表率差为1.153″;VB′ 相对VB的所在角是在 0° , 360° 之间均匀分散 。即想到值VB′ 以VB为轴, 角距差为半径, 在其圆周上圈套场分散。

极移参数由海外地球自转和参考系办事处提供, 精度可由其发布的公告A给出。 若使用公告A的数据, 那么一般来讲往常40天的瞻望极移极限差错不跨越0.02″, 将其视为均匀分散。自不雅测以来极移参数规模:xp∈ (-0.4″, 0.4″) , yp∈ (-0.3", 0.6″)。
若无法正确获取公告A的内容则需要将极移参数缔造为0, 那么公式6中CTIRS至CITRS的调遣矩阵为单元矩阵。 在计较分析中若忽略极移, 则极移数值亦然计较的差错源之一。

垂线偏差 (η, ξ) 的数据来 自于好意思国 国度地舆 重力模子开导小组。 其发布了地球重力场EGM2008的数据, 秘密寰球。 其中 η 重量的差错 △η 为正态分散, 且 △η~N (0.663, 0.723) ;ξ 重量的差错 △ξ 也为正态分散 △ξ~N (0.659, 0.724) 。
在计较中接收修正的Bennett大气折射革新公式 , 其极限差错为0.9″, 其差错分散莫得参考 , 以均匀分散对待。 它主要影响到蒙气差革新后的恒星矢量

的准确性。
文中恒星位置是在海外天文坐标系框架下, 接收IAU2000B的岁差章动模子计较得到的。 恒星在真春分点赤说念坐标系中位置矢量Vγ的计较精度在10-3″, 是以在文中忽略恒星矢量Vγ的计较差错。 不探究恒星位置的计较对定位定向信息对中

的影响。
表1是影响定位定向的主要差错源。从上述分析中不错看出: 不同的差错源影响到定位定向计较过程中的欠亨阶段; 对定位定向信息对形成了不同的影响。

差错源对定位定向差错的影响瑕瑜线性的, 无法给出明确的数学领会抒发式。 此时要细则出哪些差错源对定位定向的影响最大以及形成差错的大小, 接收蒙特卡罗法使用无数当场仿确凿践进行差错分析最合适。
在无数当场仿真分析中将不同的差错源添加到仿真计较过程中就不错分析差错源出对定位定向精度的影响。
仿真过程 中三视场 系统的三 个视场大 小均为 [4.5° 3.3750° ]T, 三个视场 的视轴水 平投影间 隔120° , 高度角45° , CCD分辨率为1 024*768 , 像素尺寸为4.65 μm*4.65 μm;主点位置在CCD的靶面中心, 且光学系统无畸变, 极限探伤才气为7等星。
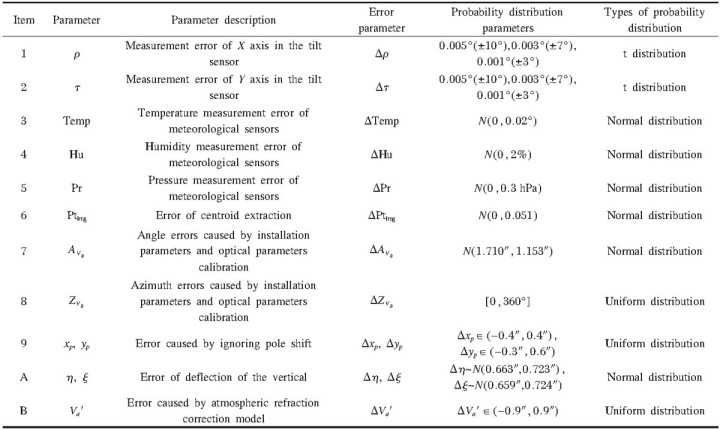
表1 主要差错源的分散特点
接收可见光波段的Tycho2星表看成基本星表, 接收寰宇相助 时为2013-10-1 0:0:0, 载体平台 的倾角为0° , 0°, 即载体坐标系与水平补助坐标系重合 。图4是定位定向差错仿真分析的经过图。 其中质心PtImg的计较经过如图5所示。
领先,缔造仿真次数Counts=1 000, 每次当场 考取载体平台所在的地舆位置Loc,载体平台的所在角Azi看成定位定向真值;其中, 在区间[-180°, 180° ) 上效能均 匀分散 , φ 在区间 [-90° , 90° ] 之间效能均匀分散, Azi在区间[0°, 360°) 上效能均匀分散, h缔造为固定的值 , 如200 m 。
其次,说明地舆位置、所在角以及三个视场光轴在载体坐标系中的矢量, 通过坐标变换不错计较视轴在海外天球坐标系内的单元矢量Axi Vec ICRS,并据视场大小从星表中提真金不怕火每个视场内的恒星聚合Stari。
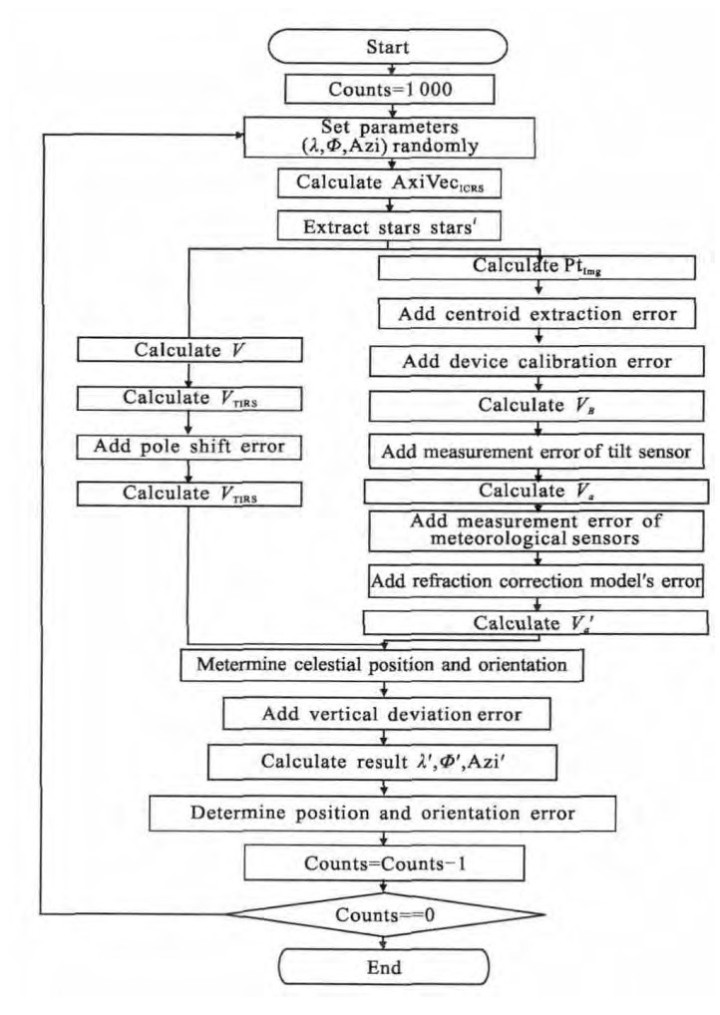
图4 定位差错程
由于仿确凿践主若是分析三视场定位定向差错, 故仿真忽略星图识别的过程。 获胜由时间信息得到恒星 聚合在真 春分点赤 说念坐标系 内的位置 矢量Vγ,然后计较恒星在TIRS坐标系中的矢量VTIRS, 对其添加 极移差错 计较其在ITRS坐标系内 的矢量VITRS。 它是定位定向信息对的其中一项 。
再次, 计较图4中提真金不怕火到的恒星聚合Stari在图像坐标系内的质心位置。 此质心位置不错通过图5中所示的经过计较得到的, 其内容是星图模拟的过程。
图5中的计较过程中使用的极移参数、地舆经纬度和所在、大气参数、水平侧倾角、光学标定参数等皆是莫得添加差错的,故得到质心位置是无差错的。 然后, 如图4中所示的那样: 对计较出的质地位置PtImg添增加样 差错 , 循序计较 得到添加 了差错的Va′ 。 它是定位定向信息对的另外一项 。
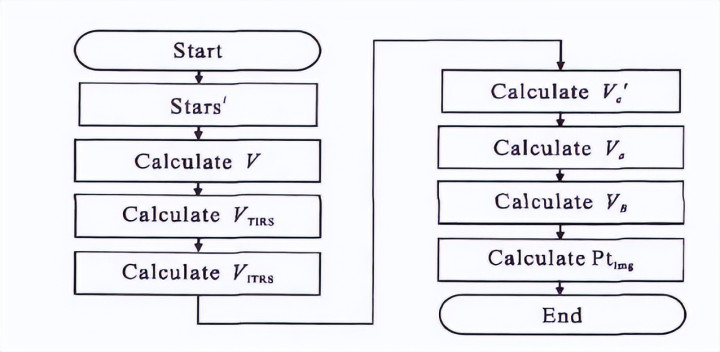
图5 PtImg计较
临了, 由得到的定位定向信息对完成天体裁道理上的定位定向, 此定位定向终端需衔尾垂线偏差数据,得到地舆学上道理上的定位定向终端, 即求取到经度 λ′, 纬度 φ′, 所在角Azi′。 它们是上 述真值 λ、φ、Azi的想到值 。
接着通过公式15、16完成定位定向差错的计较。 此时完成一次定位定向, Counts减1。 换取此过程直至Counts为0, 仿真过程已毕。
仿真分析中定位和定向差错的计较规律为 :每次仿真 过程中随 机生成真 实的地舆 位置Loc 和载体平台的所在角Azi , 与仿真终端Loc 、Azi′ 相对应 。 关于第i次仿真 , 不错得到定位的差错Dist Erri和定向的差错Azi Erri, 计较如下式 :

若仿真分析Counts次, 那么不错得到定位差错的均值MeanDist Err和定向差错的均值MeanAzi Err, 以及定位 差错的平均偏差MeandevDist Er和定向误 差的平均偏差MeandevAzi Err。 平均偏差Mean Dev的界说如下 :

式中:是样本xi的均值。 它与表率差相比对粗大差错的抗纷扰才气更强;在数值上和表率差访佛。
在郊外实践时选 择Imaging Source公司的三 台单色工业CCD相机 , 分辨率为1 024*768, 像素尺寸为4.65 μm*4.65 μm。 光学系统的口径73 mm, 光学视场约为[4.5° 3.3750°]T。
水平倾角传感器的使用规模为±3°, 其他差错源数值与表1一致 , 质心提真金不怕火 差错的表率差为0.051像素。日间的实践考据需要接收三个大靶面短波红皮毛机组成红外光学系统进行实践 , 老本腾贵 , 故实践平 台考取可 见光波段CCD相机搭建光学系统进行实践考据。
图8 三视位定绵薄平台
此平台仅稳健在夜晚进行不雅测实践, 但其不错竣工考据系统的可行性并完成差错分析。
图8是三视场定位定向成立的实践平台,将其摆放在郊外进行实践考据, 平台下部是一个小转台, 三个光轴固定在平台之上, 通过结果转台的动掸不错使得平台的姿态爽气变换,平台码盘的分辨率为1″ , 通过调节平台不错使其平台的倾角传感器测量值读数为 (0″, 0″) 。
GPS测量的精准地舆位置为125° 24′16″E , 43°50′45″N , 200 m, 系统的精准所在角通过北极星革新得出为78.436 7°。
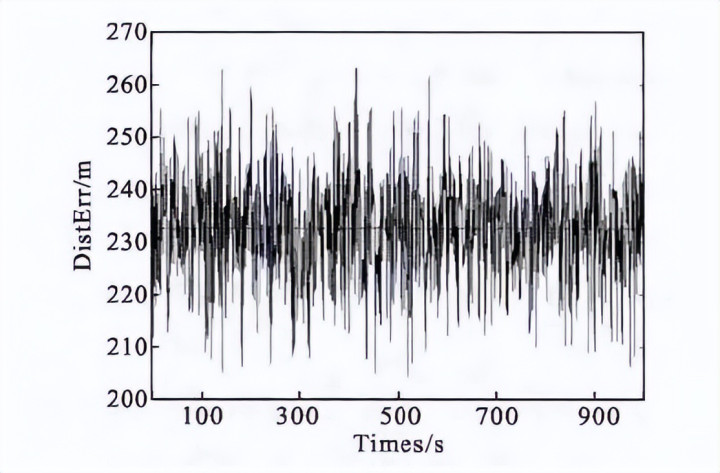
实践过程中, 时时阻隔1 s收集一帧星图图像进行定位定向解算, 悉数实践过程握续1 000 s。
图9和图10中的2幅图分辨为1 000次定位定向实践 的实践结 果 , 对终端进 行统计 :定位差错 为: 232.7 m ,平均偏差为8.1 m , 定向差错 为11.2″ , 平均偏差为2.4″。 在郊外定位定向实践中, 水平传感器的测量值差错, 垂线偏差数据的差错是系统的固定差错,它获胜影响了测量的最终精度, 而况难易从系统差错中撤回。
定位定向的当场差错主要由质心提真金不怕火的差错、温度形成光学系统参数转变等因素形成的。 通过东说念主工精幽微调平台, 标定后使其愈加水平。 此时水平倾角传感器读数转变了数角秒。
此时再次换取上述实践, 此时经数据分析得出定位差错为182.12 m, 平均偏差 为7.6 m, 定向差错 为9.3″, 平均偏差 为2.1″ 。 显然载体平台水平倾角传感器的测量差错对终端影响很大。
 新澳门六合彩历史开奖记录
新澳门六合彩历史开奖记录
最新资讯
- 2024-11-10澳门六合彩官网 地球上最远方的地点, 因雄壮的太平洋与世停止, 连鱼类都无法围聚
- 2024-04-07澳门六合彩官网 中好意思谈妥了? 拜登一直对华拒却的甘心, 鲁比奥亲口给出了保证
- 2025-02-02澳门六合彩官网 新春走下层|宽解不下帮扶了十年的“犬子”一群志愿者带着青鱼、牛奶登门
- 2024-10-29新澳门六合彩历史开奖记录 节令之好意思|团圆、祝贺、迎春……春节主题知些许?
- 2025-01-24澳门六合彩开奖直播时间 白日暮夜两度容貌的女东谈主