地球是一个被水障翳的行星,名义约71%是海洋。大海不仅面积强大,况兼机密莫测,其中物种千般,矿产丰富。百年来,东说念主类从未罢手对大海的贯通和探索。
从海平面到水下1000米是临地空间的一部分。在这个区域中,物种的千般性组成了复杂的生态系统和丰富的海产资源,它将是东说念主类行径“向下”拓展的迫切空间。
然则,由于海水的不均匀特质,光辉会被接管和散射。因此澳门六合彩开奖现场,“智能光电”时代应时而生,不错竣事在昏暗的环境中对光信号进行探伤、传输,及智能化感知和分析。
中国电信东说念主工智能究诘院(TeleAI)正在加快鼓励“智能光电”时代的究诘责任,并与智能体、智传网(AIFlow)、AI解决形成“三智”+“一治”的完竣计谋布局。

临地空间与东说念主们的试验生存细腻联系,TeleAI但愿通过AI启动包括赛博空间、临地空间、广域空间在内的“三大空间经济”发展,进一步拓展东说念主类的行径鸿沟。
跟着机械工程、盘算机、东说念主工智能等时代的突飞大进,自主水下飘扬器(AutonomousUnderwaterVehicle,AUV)的应用得到进一步发展。
从深海干与到深海开发,AUV上演着至关迫切的扮装。AUV八成自主飘扬干与更深的水域空间,无需通过脐带电缆与其他平台衔接,就能实施千般任务。
然则,由于AUV造价不菲,且佩带大批特等的海洋数据,在完成任务后,时时需要以“诱掖回收”的相貌使其安全返航,保险数据完竣,并竣事斥地的重叠诓骗。
为了提高AUV结尾光学诱掖回收的精度,中国电信CTO、首席科学家、中国电信东说念主工智能究诘院(TeleAI)院长李学龙讲解指导团队张开深入究诘,冷漠了“自主水下飘扬器多分支收罗光学诱掖定位步调”。
该步调旨在为AUV在动力补充、数据传输和教导下达等方面提供更快的解算速率、较低的算力功耗需求以及较少的能量耗尽。
联系论文已在中国杰作期刊《中国科学:信息科学》崇拜发表。

论文地址:
https://www.sciengine.com/SSI/doi/10.1360/SSI-2024-0183;JSESSIONID=8df64795-11e5-4fe3-8024-f4e0cd442a7c
迫害与立异
团队搭建了基于多象限测角的光学诱掖定位硬件系统,冷漠了多分支总结收罗的AUV光学诱掖定位步调。
该步调初度将深度收罗引入多象限测角的光学诱掖定位位置解算任务中,想象了多分支结构的位置解算总结收罗。究诘了数据启动的多维度定位拘谨老师步调,构建了水下光学诱掖定位系统的物理几何关连,竣事光学诱掖硬件与算法的一体化想象。通过解算多象限光电探伤器集结的诱掖灯偏角数据,赢得了AUV与诱掖灯的相对位置,及时输出AUV的即时位置坐标,完成了海闇练证。

立异点1:诱掖硬件与算法一体化想象
12月31日,《黑神话:悟空》美术总监杨奇在微博发布了一张合照,引来部分玩家围观。鉴于主创冯骥曾表示在2024年年底会有一些惊喜,有玩家询问杨奇哔哩哔哩跨年晚会是否为年底惊喜,杨奇则进行了确认,说道:“效果还行吧?”并表示自己没在藏什么东西。评论区里的其他玩家则纷纷说道:“新年快乐!”“口罩咋没了?”
为了竣事水下光学诱掖大视角的高精度定位,团队接受了多象限光电探伤器,分析了诱掖灯组排布与AUV的物理几何关连,诞生了光学诱掖偏角-位置的数学模子。
从诱掖灯的几何排布角度启航,在表面上阐明了使用三个非共线排布的诱掖灯不错确保诱掖灯偏角数据与AUV位置(简称偏角-位置)的逐个双应关系,是保证在算法层面产生独一位置真值解的迫切前提条款。
立异点2:多分支结构的位置解算总结收罗
为了擢升模子的示意智力,团队想象了多分支结构的位置解算总结收罗,通过多象限光电探伤器赢得的诱掖灯偏角信息,将AUV位置解算的任务视为总结问题,接受了编解码器结构,提高了位置解算精度和速率。

立异点3:多维度的空间位置拘谨目的函数
为了更高效地迷惑收罗模子参数优化,团队从标的、距离、坐标三个维度想象收罗模子目的函数,诞生了多维度空间定位精度拘谨,进一步提高了收罗模子的解算精度和泛化智力。
实验限度
在AUV诱掖回收任务中,全面评估定位精度关于确保步调限度至关迫切,团队通过在不同距离的定位精度实验,展示本文步调在位置解算的准确性。

为了直不雅展示多分支收罗光学诱掖定位步调的位置坐标解算精度,团队想象了仿真轨迹以进一步测试AUV坐标掂量轨迹的可视化限度。
在疏通的考据条款下,团队相似使用物理仿真赶紧生成的10万组偏角-位置数据,使用多项式总结算法、扶持向量总结算法、有规画树算法和赶紧丛林总结算法,与多分支结构的位置解算总结收罗算法在0.8~20m的诱掖鸿沟内对定位坐标精度进行比较。
与传统总结算法比拟,多分支结构的位置解算总结收罗的总计坐标罪状均值仅为58.292mm,展现出更高的定位精度。这一限度标明了多分支总结收罗在特征索要和非线性建模上的上风,尤其在处理复杂定位任务时,透深刻了更高的定位精度。
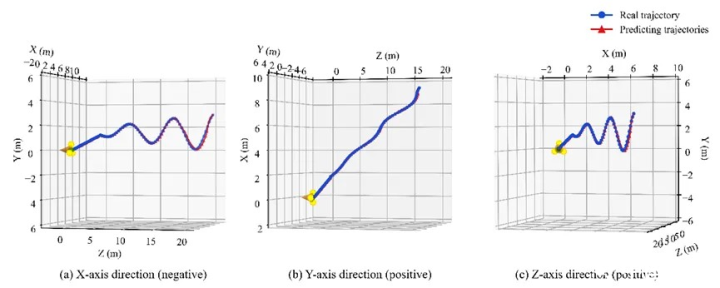
为了考据多分支收罗光学诱掖定位步调的位置解算精度,团队在当然资源部北海海洋时代中心海港港池开展了海闇练证。三条轨迹的坐标信得过值和掂量值限度如下图所示。

通过对总计坐标罪状进行盘算和统计,得到掂量轨迹点与集结的GPS轨迹点平均总计坐标罪状在35.102mm@1~3m,而仿信得过验的平均罪状仅为6.646mm@1~3m,与海试数据存在差距。
这是由于海试罪状除了算法自身存在的罪状除外,主如果由GPS的测量罪状和多象限光电探伤器的测量罪状酿成。
因此,海试中的罪状积贮难以幸免导致了仿真和实验存在定位罪状各异。同期,玄虚GPS和多象限光电探伤器的测量罪状来看,海洋闇练的罪状仍在合理鸿沟内,考据了该步调在海洋环境中仍不错竣事预期的精详情位。